Αναρτήθηκε σεΕργαστήρια
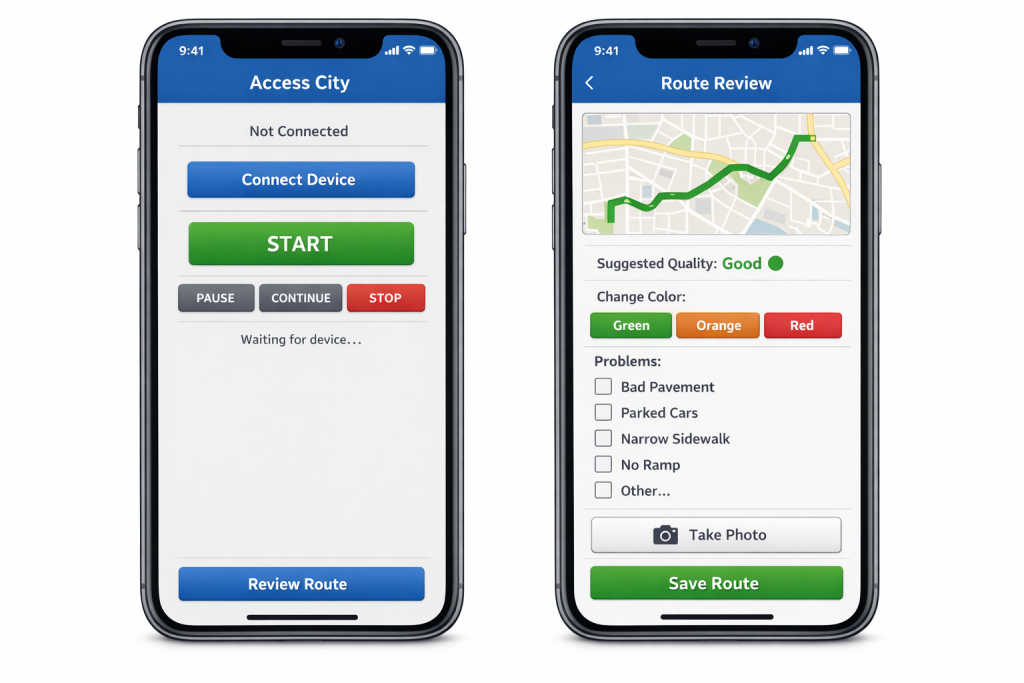
Access City – Σχεδιάζοντας την εφαρμογή (App Inventor)
Μπορούμε να χαρτογραφήσουμε πόσο προσβάσιμη είναι μια πόλη; Πολλοί δρόμοι και πεζοδρόμια φαίνονται καλοί με το μάτι, αλλά στην πράξη είναι δύσκολοι για κάποιον που χρησιμοποιεί: αναπηρικό αμαξίδιο παιδικό καρότσι…








